线激光扫描的原理就是激光三角测距的原理,通过图像校准得到高度数值。
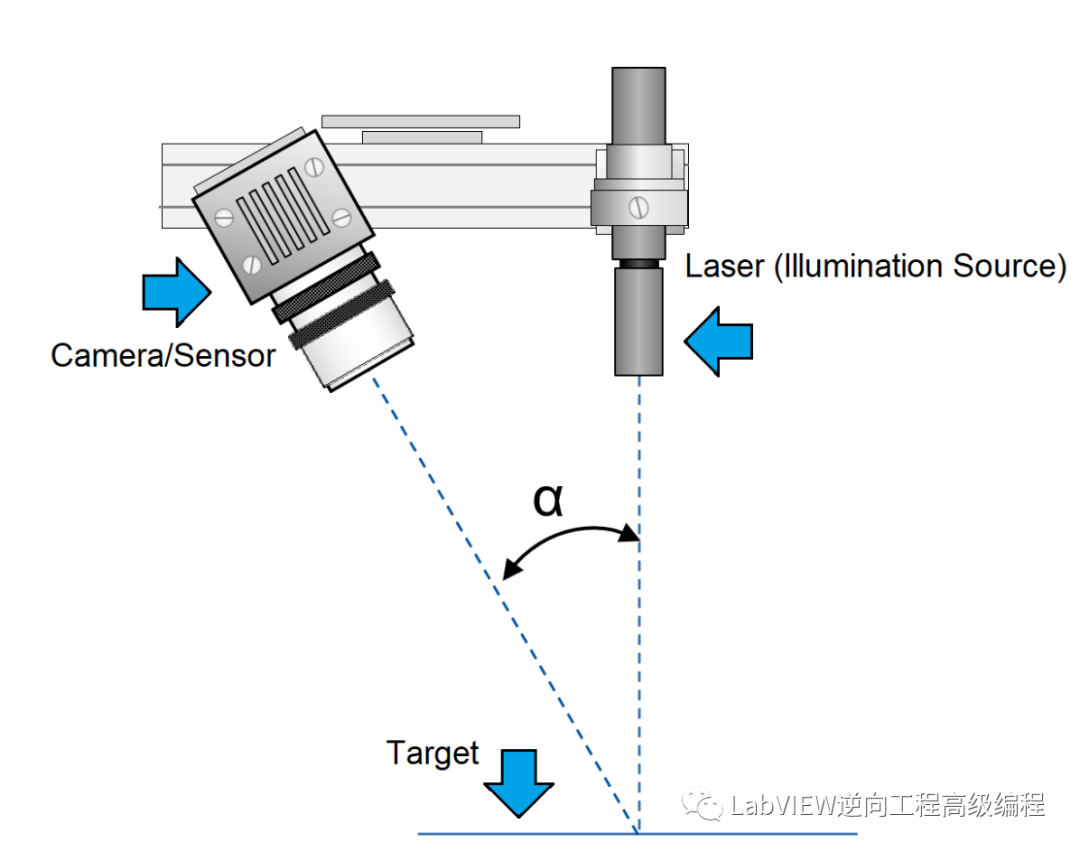

要求精度不高(>0.1mm)的场景我们完全可以按照原理自己搭建硬件结构,扫描范围完全可以根据我们自己需求通过调整相机与激光之间的距离来进行调整,线激光的波段也可以根据扫描材料的不同来调整线激光的波段,搭建完成后通过相机校准,完成整个系统的标定。这套系统的精度取决于4个方面,1是相机的分辨率,2是线激光的线宽、光的均匀度,3是相机与激光的校准精度,4图像中激光条纹能量重心提取精度。这几个方面是制约这套系统精度的关键。
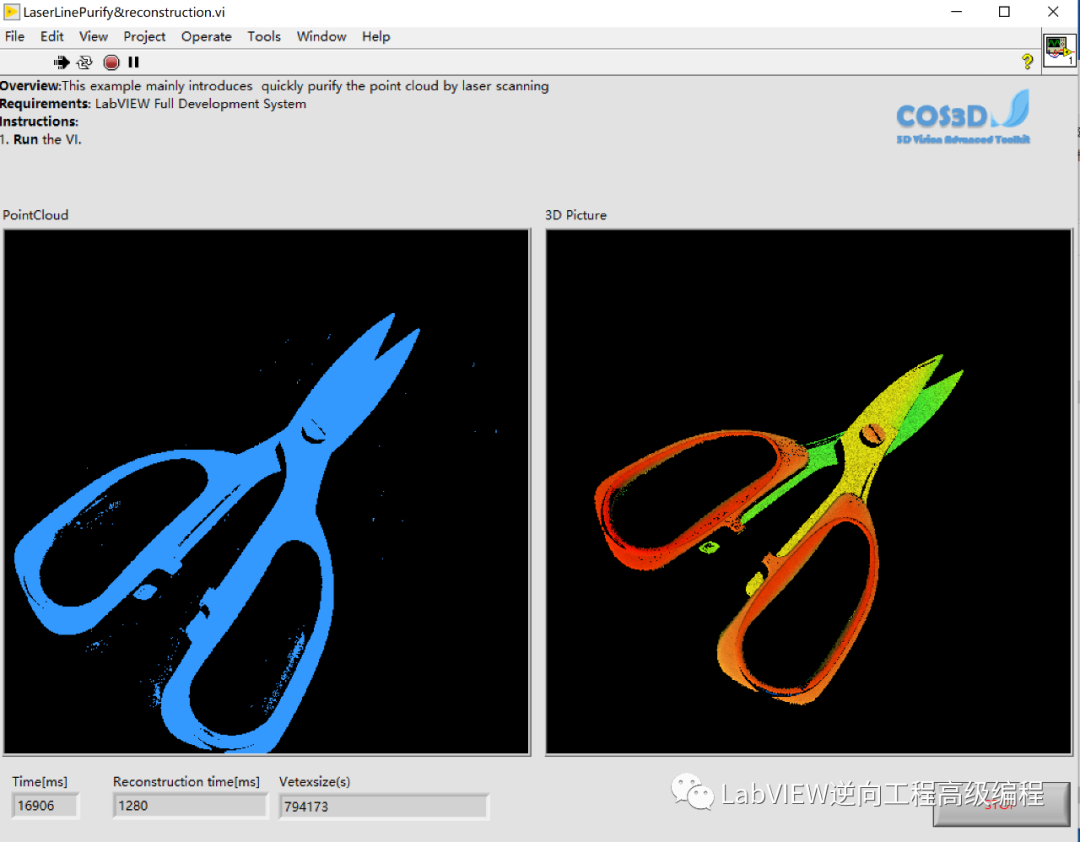
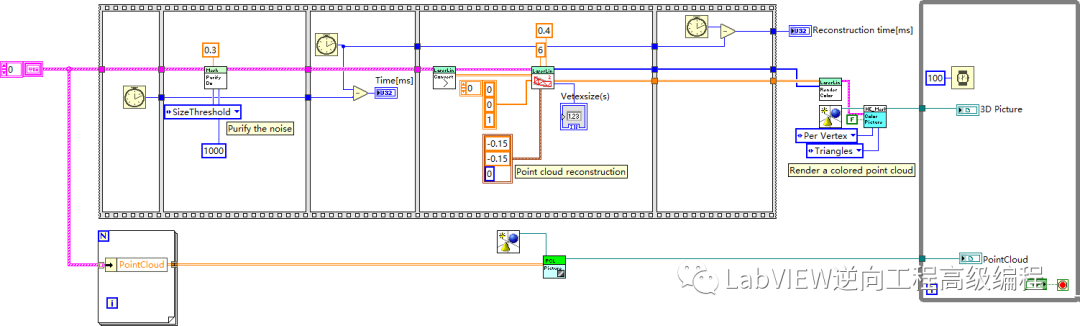
在扫描过程中由于物体表面反射及周围光线的干扰,导致扫描完成后会有噪音的出现,这将影响三角网格重建质量、点云配准效果等后续计算。
3D Vsion Advanced Toolkit For LabVIEW工具包专门针对线激光扫描封装了一套高效的运算库,其中就包含点云快速净化。
作者通过自己搭建的激光扫描系统(标定精度0.008mm),扫描了一把剪刀,对扫描后的点云进行噪音净化并重建,如下图所示:
有这方面的问题欢迎交流!
=========================
很多伙伴希望将线激光扫描的图像处理部分(线激光条纹能量提取)与LabVIEW双目视觉的真正落地算法库打包起来,这个后续会安排封装成COSdx三维点云采集库,方便伙伴们通过库函数快速搭建自己的应用!
声明:文中观点不代表本站立场。本文传送门:https://eyangzhen.com/221832.html