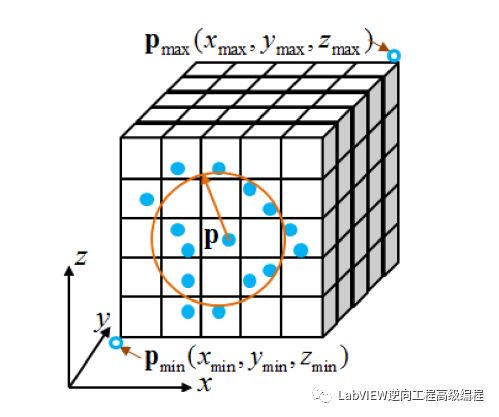
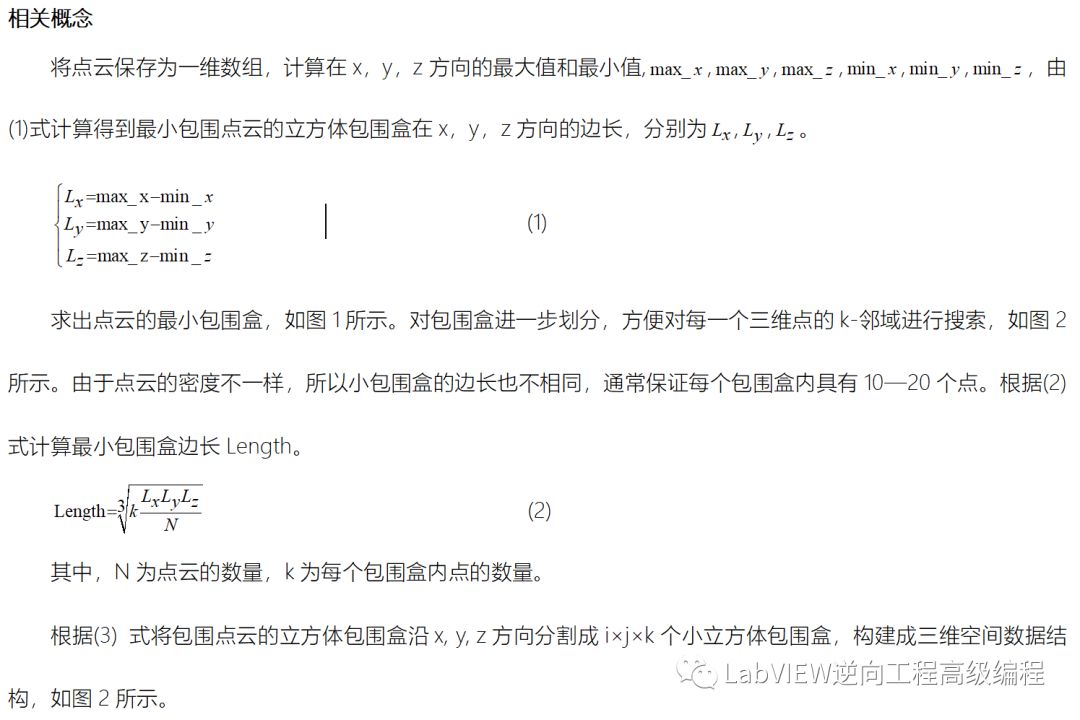
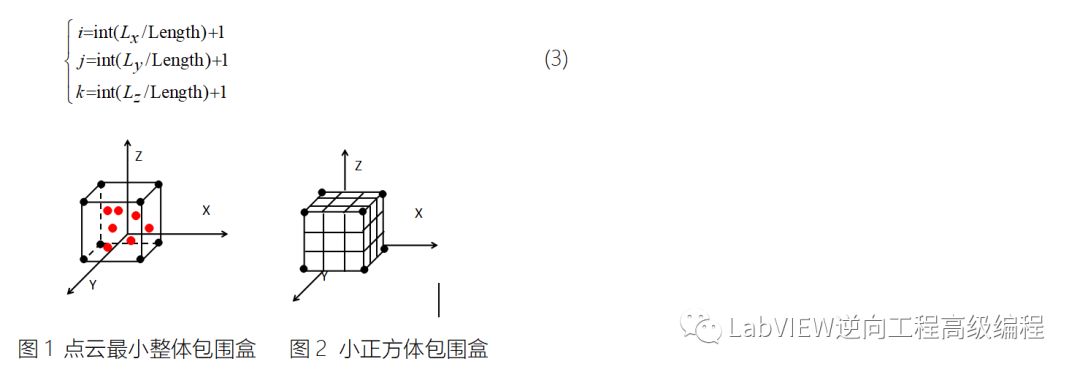
在逆向工程中,点云阶段的处理包括聚类分析、点云去噪平滑、点云三角网格重建等操作都需要基于点云K邻域的计算,点云K邻域的计算在逆向工程中至关重要。三维点云和两维图像的邻域有明显区别,二维图像像素之间都有严格的拓扑关系,三维点云没有严格拓扑关系,但可以借助两维图像思想,为三维点云建立“体素”,如下图所示,P点的K邻域代表的是以P点位球心,半径内的点的集合,构成P点的邻域,K代表的是P邻域内最近的几个点。

在构建三维点云的体素拓扑关系时,目前有均匀网格法、OcTree八叉树法、KDTree法等,我这里主要介绍均匀网格法和OcTree八叉树法。
1. 建立均匀立方格的三维点云拓扑结构
根据点云的长宽高及立方体的边长,初始化计算需要建立的三维立方体数据结构,立方体我们抽象为LabVIEW里面的簇,每个立方体里面有20-50个点云,在簇里面包含点云数组,如下图所示:
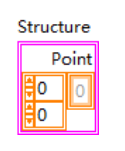
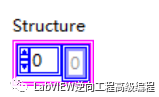
有些同学是不太注意内存的优化,当数据量大的话,严重影响运行效率。在这个结构中,我存储的是三维点云的二维DBL数组,100万个这样的结构还是占用不少内存空间的,优化成储存点云索引的I32一维数组,大大节省内存空间,如下图所示:
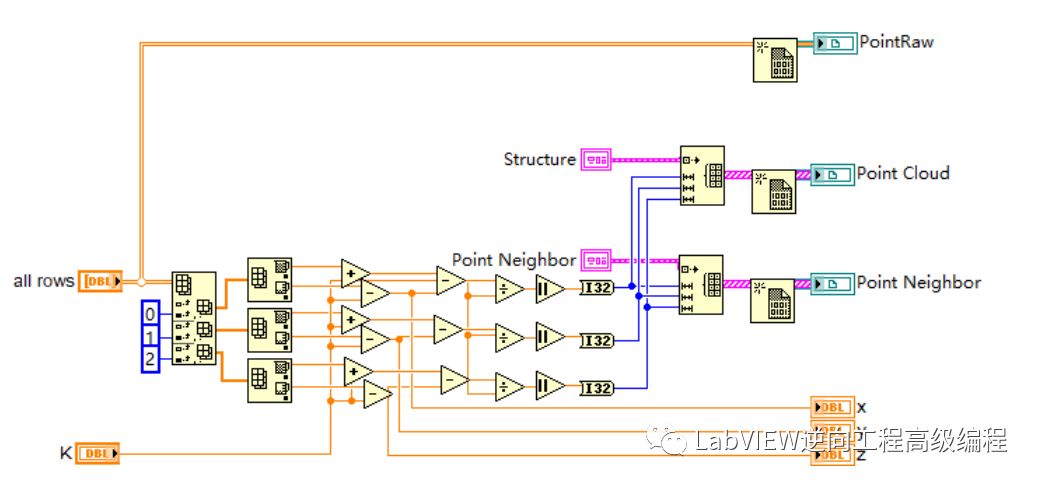
1. 点云插入数据结构
每个点计算在拓扑关系的位置,然后根据位置插入,代码如下:
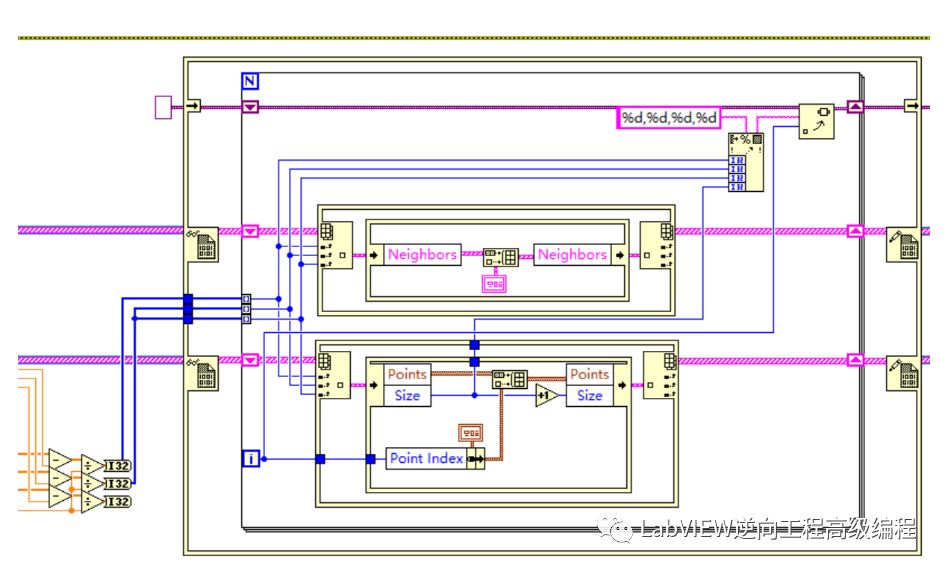
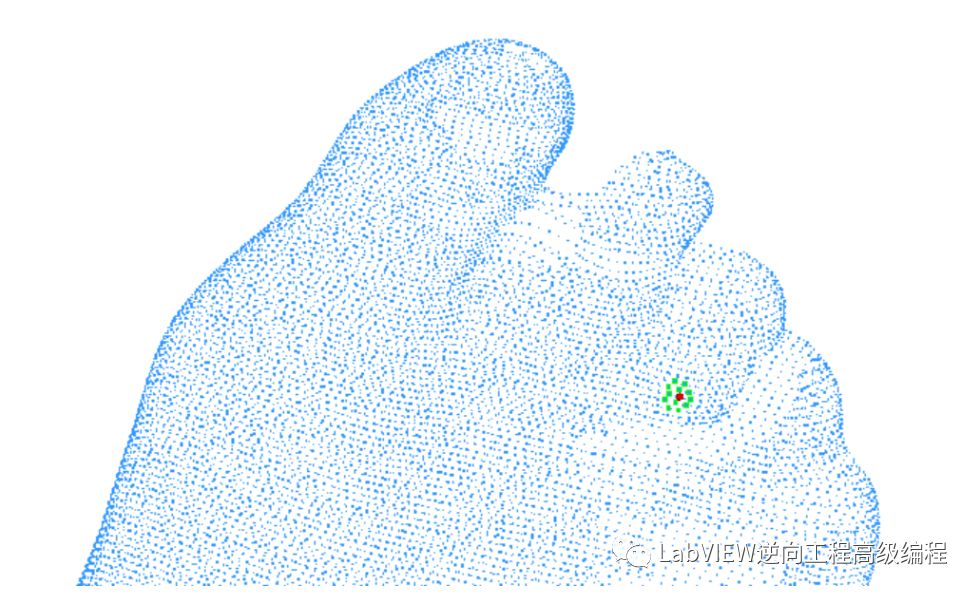
1. 种子点的K邻域
给定种子点,获取该点在三维拓扑结构中的位置索引,根据索引值计算邻域26个索引值,并读出26个立方体的点云,该点云集合就是种子点的邻域值,如下图所示,以红点位种子点的13邻域集合,绿色点。
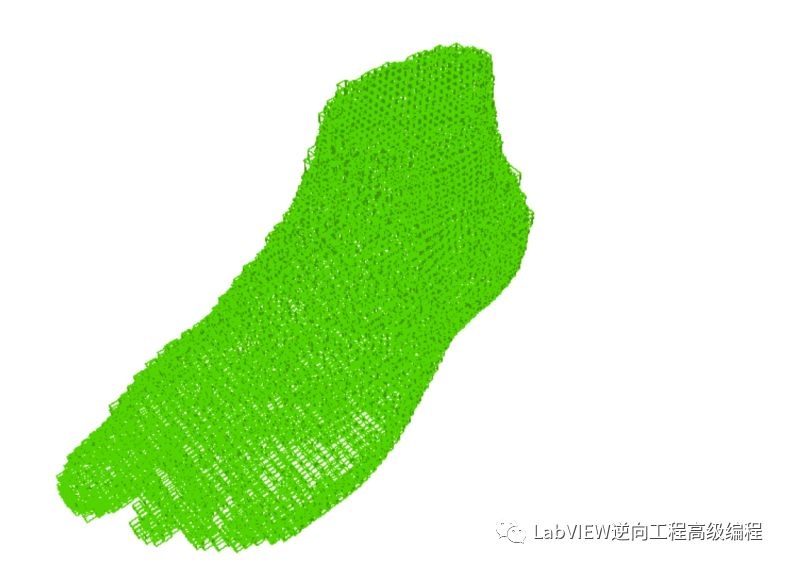
2、基于OCTree的八叉树数据拓扑结构
可以发现在均匀网格拓扑数据结构中,会有很多中空的无效空间被初始化,对于数据量较大的表面轮廓点云来说,均匀网格拓扑数据结构很多空间被浪费。OCTree数据结构很好的解决了这个问题,有点的地方迭代分割下去,没有点的地方停止分割,在我的一篇文章《LabVIEW OcTree(八叉树数据容器)》中介绍过这个方法。我拿一个点云为例子看下分割效果,如下图所示。
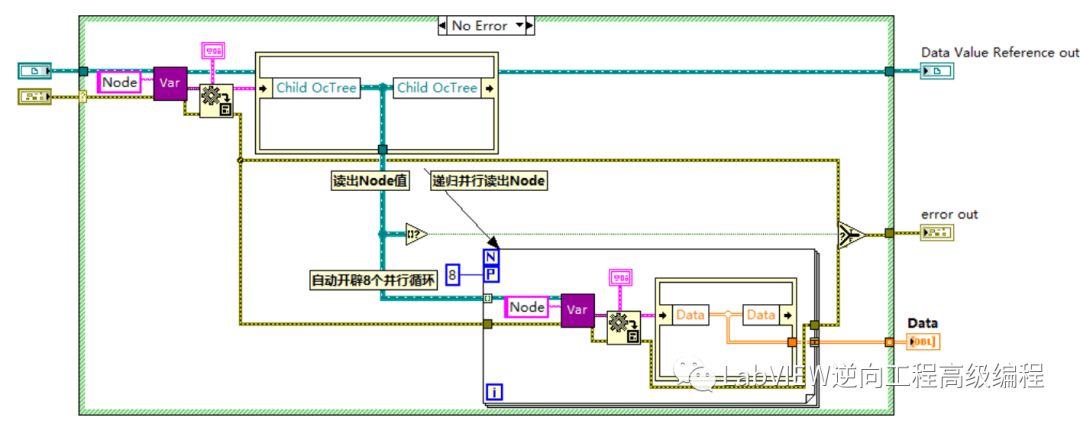
基于OCTree的K邻域方法相对比较好理解,OCTree的特点就是每一层具有8个同类如下图所示;
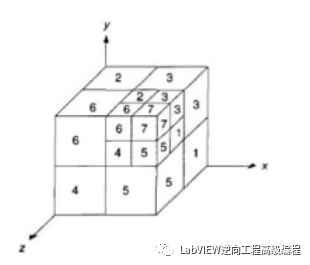
种子点所在立方体父类的8个子节点中的点云根据距离排序,截取K个值,既种子点的K邻域。读出子类中点云的方法:
声明:文中观点不代表本站立场。本文传送门:https://eyangzhen.com/221842.html